1.ワイヤレスボディエリア通信の研究
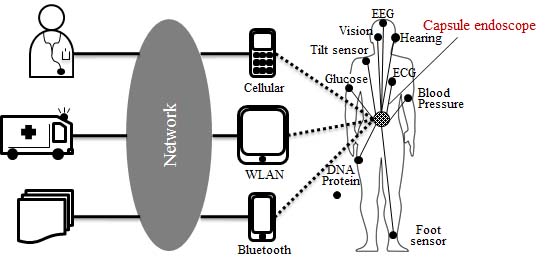
複数の情報機器を人体に分散配置して構成する人体無線網(Wireless Body Area Network: WBAN)が提唱され,例えば,生体センサなどを人体表面或いは体内に配置し,医療やヘルスケア情報を取得・制御・管理する医療支援のための通信システムの実現が期待されています.人体無線網は,
- 日常の血圧,脈拍,心電図などの健康状況や運動量などを知ることで健康管理に生すヘルスケア分野への応用を主目的とするOn-bodyで通信するウェアラブルBAN
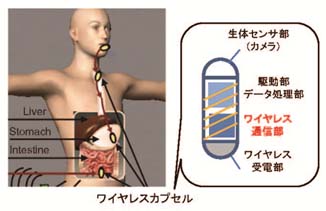
- カプセル内視鏡のように体内の医療用情報を体外へ伝送するIn-body通信のインプラントBAN
に分類され,その利用周波数帯も10-50MHzのHBC(Human Body Communication)帯,400MHz帯,2.4GHz及びUWB(Ultra Wideband Band)と多岐に亘っています.
本研究室では,10-50MHzのHBC帯,400MHz帯及びUWBを中心に,
- On-body/In-body伝送路モデルの開発
- On-body/In-body通信に適する変復調方式の研究
- In-body通信機の体内位置同定の研究
- 各種On-body/In-body通信機の試作及び通信フィージビリティの実験的検証
を行っています.
名古屋工業大学未来通信研究センター:http://cfcr.web.nitech.ac.jp/emc.html
【研究例 1】
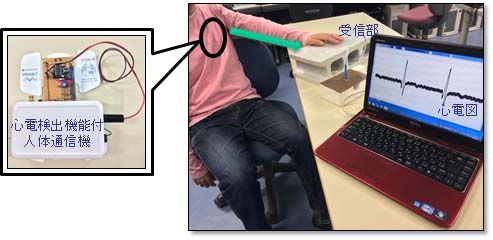
- 心電図検出と人体通信の一体化により健康情報のリアルタイム伝送を実現
胸に心電図電極を装着し,それを用いて心電図信号を取得しながら,人体通信により自動車ハンドル部に伝送し,自動車の自動制御・自動運転に活用する人体通信機を開発
- 心電検出部と人体通信部の電極を共用し,リアルタイムの心電信号検出と伝送を同時実現
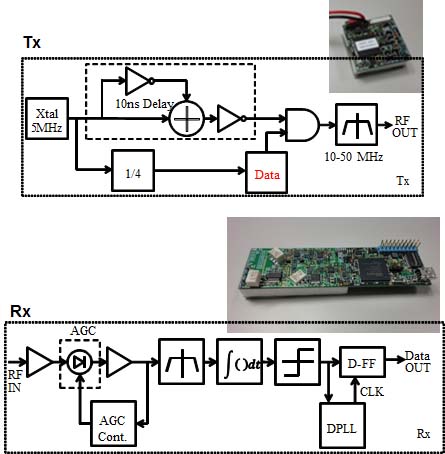
- 広帯域インパルス・ラジオ方式を採用し,1.2Mbpsの高速伝送を実現
- 送信部に搬送波不要,CMOS構成で,小型,低消費電力に寄与
- 微弱電波法を満たし,ライセンス不要,高秘匿性

【研究例 2】
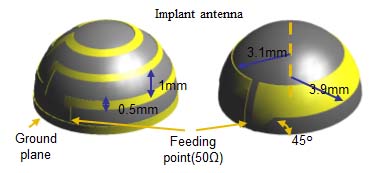
- カプセル内視鏡の高速画像伝送を想定した広帯域インプラント通信機を2種類開発
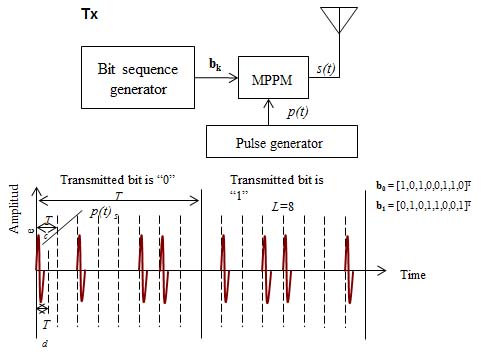
①. 3.4-4.8GHz UWB Low Band通信機
- インパルス・ラジオ型多値パルス位置変調(MPPM)方式を採用
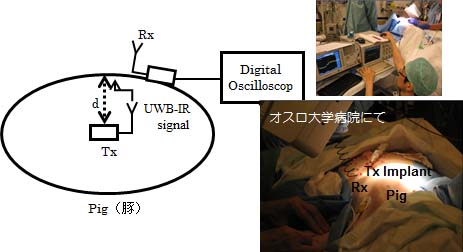
- 体内12cmまで最低1Mbpsの高速通信を実現
- 豚を用いた動物実験により通信フェージビリティを検証
- ダイバーシチ受信による更なる通信距離の向上を検討
②. 10-50MHz HBC帯通信機
- インパルス・ラジオ型OOK変調方式を採用
- 磁性材の導入により体内送信アンテナの超小型化を実現
- 体内26cmまで最低1Mbpsの高速通信が可能
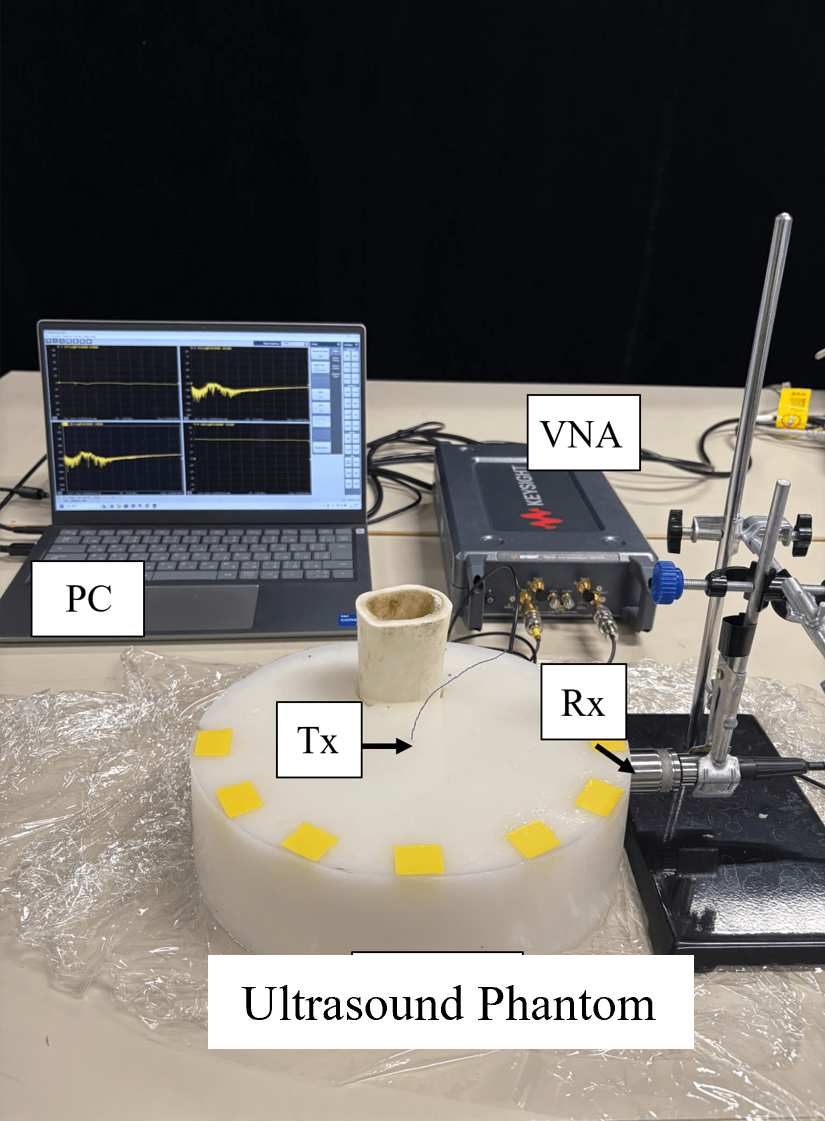
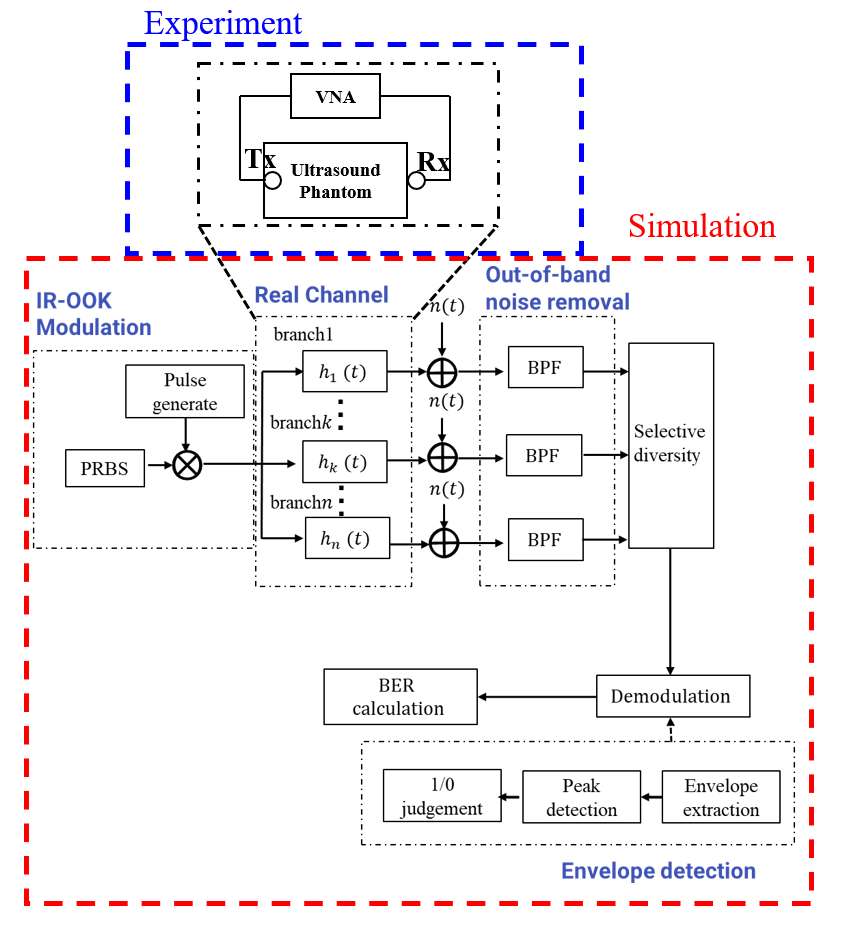
さらに、超音波は体内における伝搬損失が電波に比べて小さく、波長が約1 mmと短いため、体内マイクロロボットとの高い親和性を有する点に着目し、超音波を用いた体内マイクロロボットのワイヤレス制御技術の実現可能性を検討している。具体的には、
・体内超音波伝送路モデルの構築およびインパルス応答の導出
・超音波の高指向性に起因する送受信ミスマッチに対応するための送信ダイバーシチ技術の導入
・骨などからの反射波による波形歪みに対する等化技術の適用
・1 Mbit/s の伝送速度において BER 10^-3 以下を達成
(科学研究費補助金・萌芽研究により実施)
インプラント高速通信についての取り組み(SCOPE委託研究)
【研究例 3】
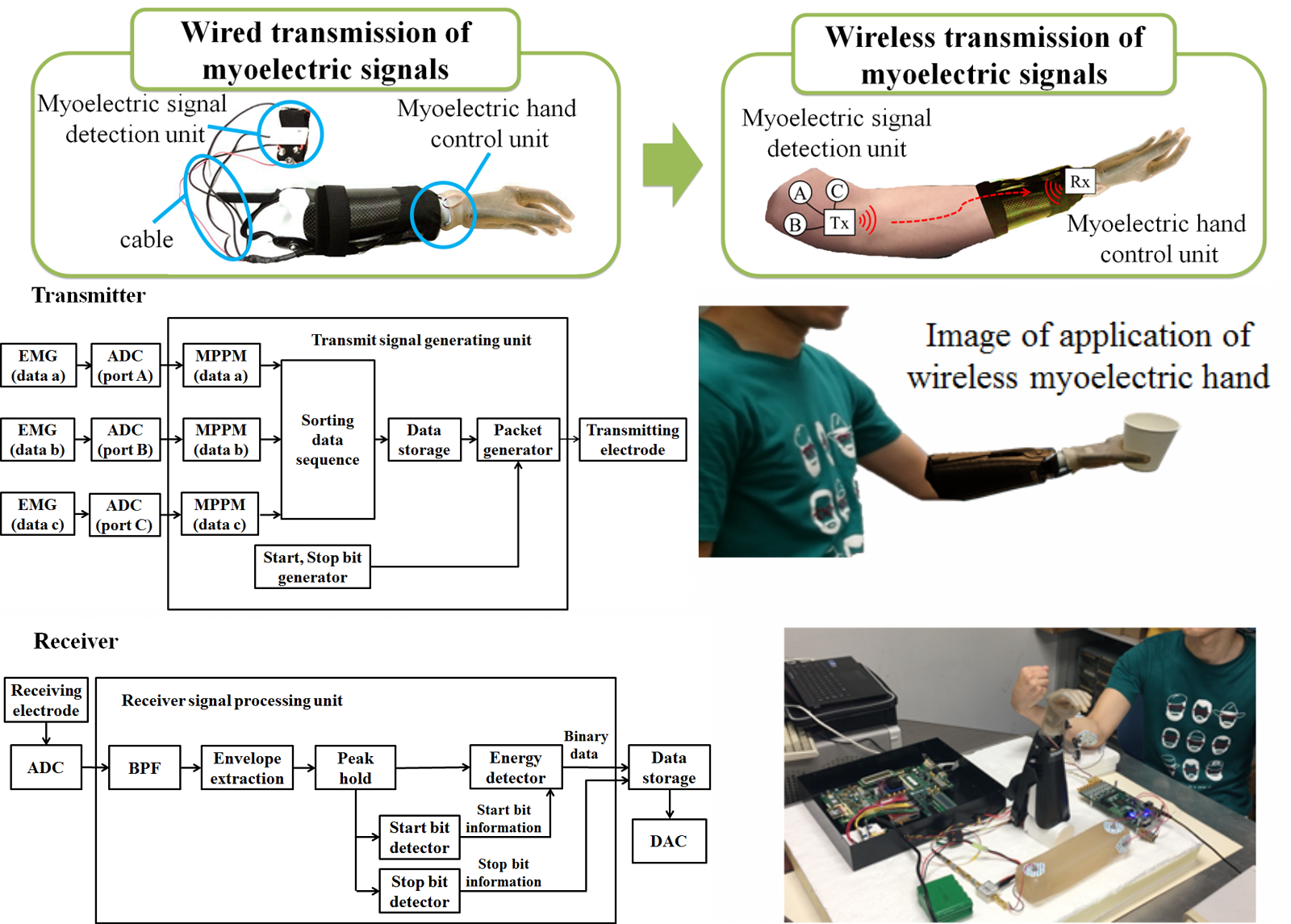
- 筋電義肢制御用信号のワイヤレス化を実現
- 筋電義手の制御用信号のワイヤレス化に向けた人体通信機を開発
腕表面に装着した3つの電極により筋電信号を取得,取得した筋電信号を人体通信により義手の動作制御部に伝送し,モータ制御を行うことで義手を操作
- 微弱電波帯(10-50MHz)を採用
- 広帯域インパルス・ラジオ型マルチパルス位置変調(MPPM)方式を採用し25Mbpsの高速伝送を実現
- 送信に搬送波が不要なため省電力な通信が可能
- MPPM方式により静電気放電(ESD)や外部電磁放射等のノイズに対し高い耐性をもつ
- 様々な人体装着型ロボットへの適用が可能
【研究例 4】
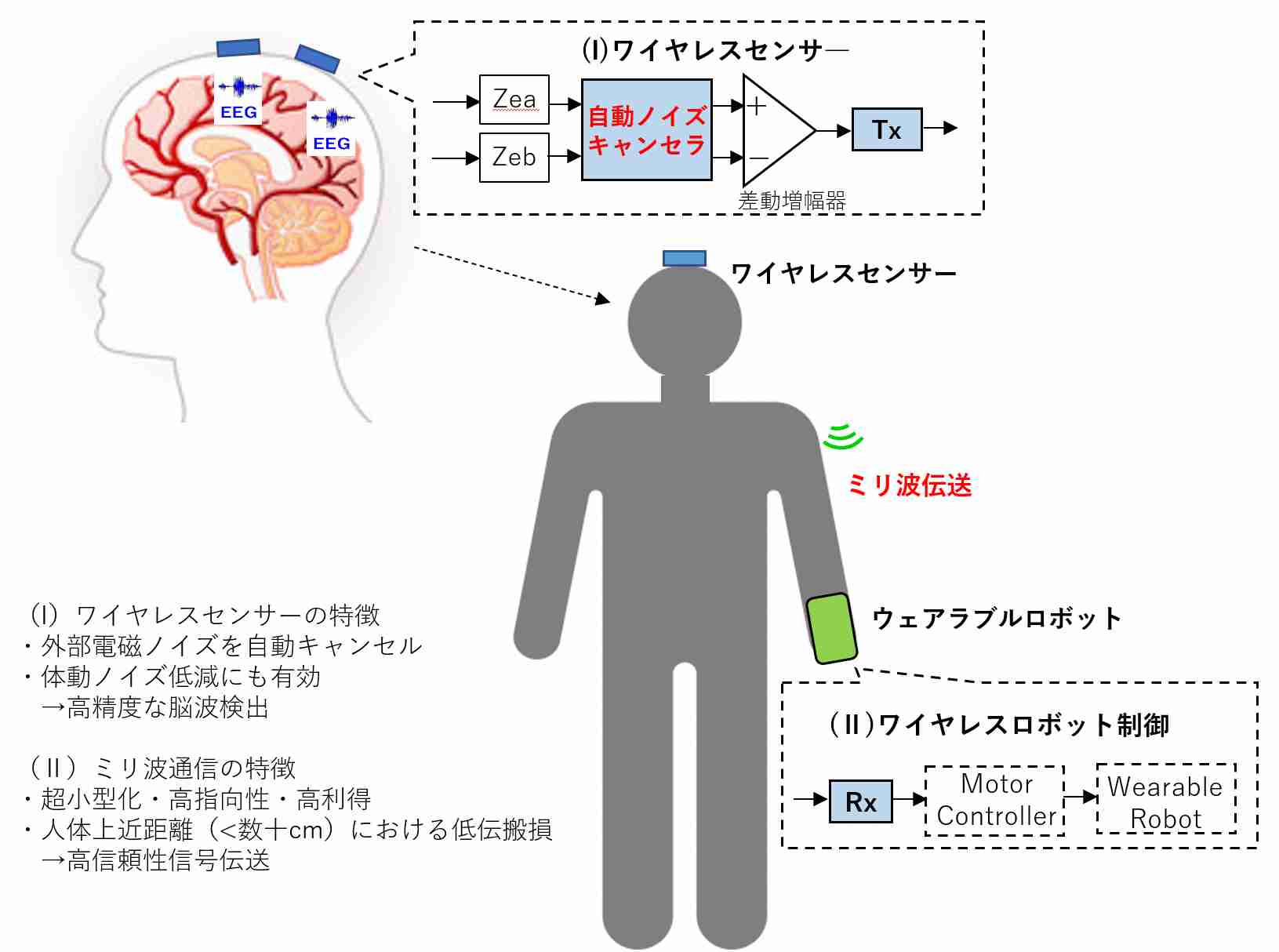
- ミリ波ワイヤレス制御
ウェアラブルロボットは、四肢運動や言語機能に重度の障害を有する患者の支援に不可欠であるだけでなく、人間の第三・第四の手足として、産業用ロボットや災害救助ロボットなどへの応用も期待されている。人間の意思に基づいてウェアラブルロボットを高精度かつ低遅延に制御することを目的として、ミリ波を用いたワイヤレス制御技術に関する研究を推進している。具体的には、
・外部電磁界によって生体センサに誘起されるノイズを抑圧・キャンセル可能な生体信号検出技術の確立
・ミリ波人体伝送路のモデリングおよびそれに基づく指向性アンテナの設計
・ミリ波送受信モジュールを用いた、ウェアラブルロボット制御のための制御信号無線伝送の実証
【研究例 5】
- 生体医療EMCの研究
人体周辺での無線通信においては,安全・安心の確保が求められています.本研究室では,安全・安心なボディエリア通信システムの確立を目指し,
- 通信電波の生体影響を解明するための実験動物ばく露装置の設計と開発
- 通信電波の心臓ペースメーカーへの電磁干渉の機構解明と評価手法の研究
を電磁界的アプローチと回路的アプローチの両方から研究しています.

2.車載通信のEMC
自動運転やコネクティッドカーなど、自動車の電子制御システムが高度に発展しており、車両システムには高い信頼性・安全性が要求されています。この要求を満たすためには、「不要なノイズを出さず、ノイズによる誤動作を防ぐためのEMC性能(電磁適合性)」を確保することが重要です。しかし、高度化に伴う機器や機器同士の通信の進化により、機器で生じるノイズが増加し通信周波数帯も高周波化しているため、EMC設計が困難になってきています。
本研究室では、名古屋工業大学未来通信研究センターと連携し, システムの重要な構成要素である車載通信のEMC設計技術ならびに評価技術の確立を目指した研究、ならびに国際標準化活動を行っています。
【研究例 6】
- 新しいEMC評価系の研究
車載通信系のEMC性能を評価する場合、評価環境の違いによって被試験機器は異なるEMC性能を示すことがあります。そこで本研究室では、実車環境とそれを模擬した標準的な評価環境の違いに着目し、ノイズの結合量・伝搬量の変化の要因の解析およびそれらを低減するための研究を行っています。また、評価系の高周波特性を精度よく評価するための新たな測定法についても研究しています。
【研究例 7】
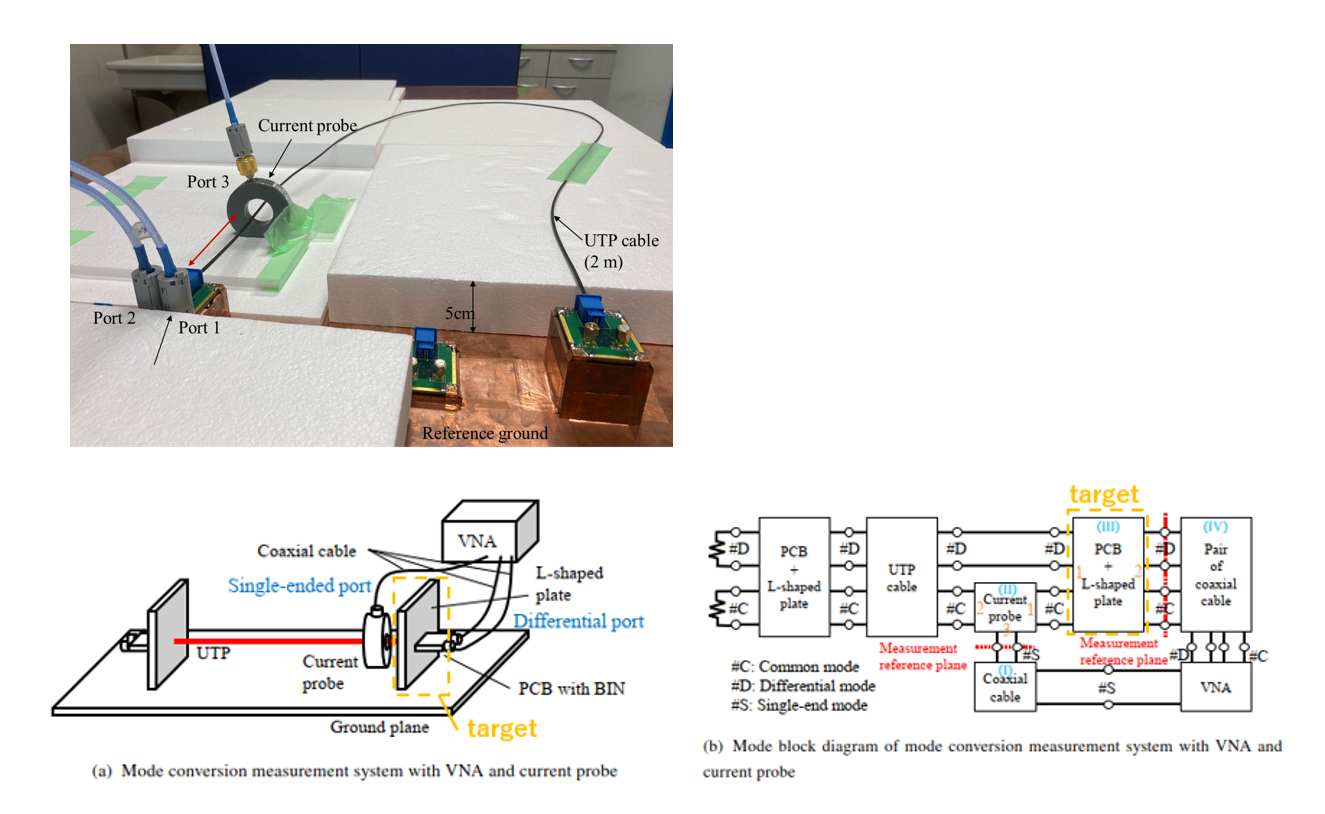
車載通信用EMCデバイスの評価・測定法
EMC設計に用いられるコモンモードチョークやESD保護デバイスには, 高いノイズ耐量と通信特性が要求されるため、信頼性の高い高周波特性の評価法の確立が求められています。そこで本研究室では、試験治具や試験機器の最適化や新しい評価方法の開発を通じて特性評価の信頼性を向上する研究と、IEC 62228-5, OPEN Alliance等での国際標準化活動を行い通信のEMC設計・評価技術の向上に貢献しています。
【研究例 8】
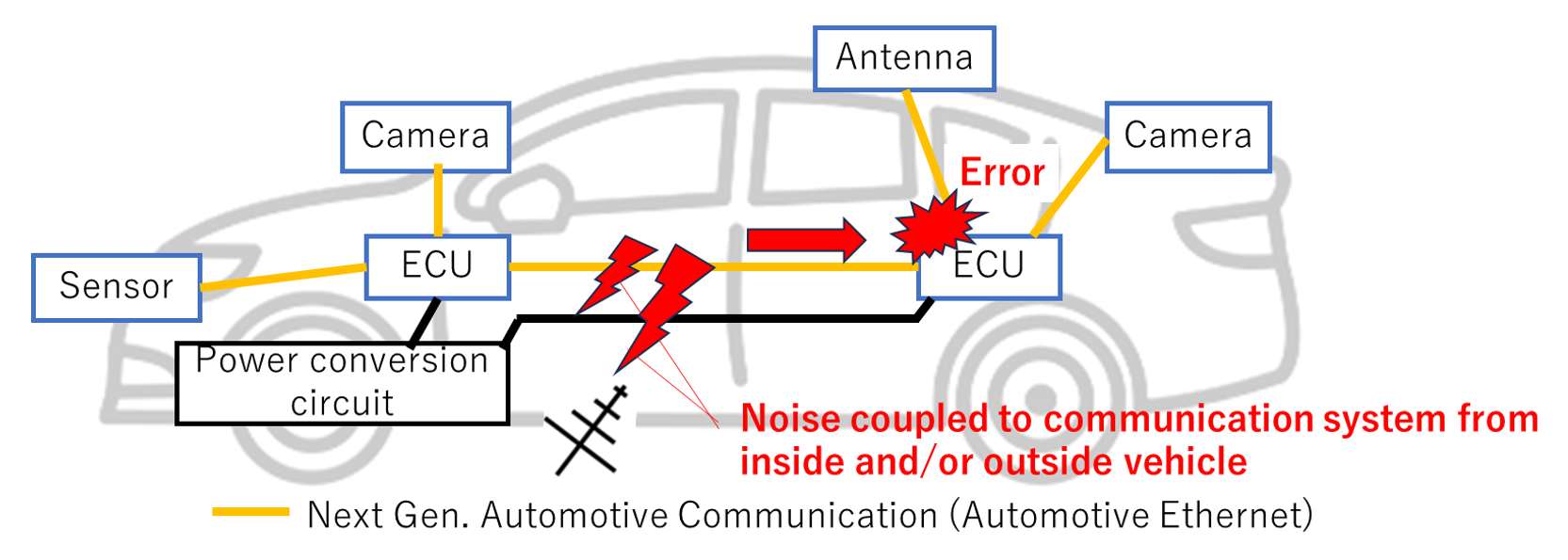
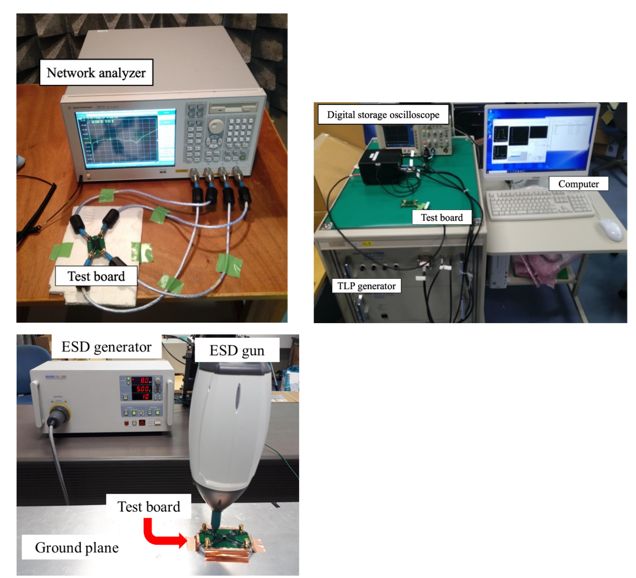
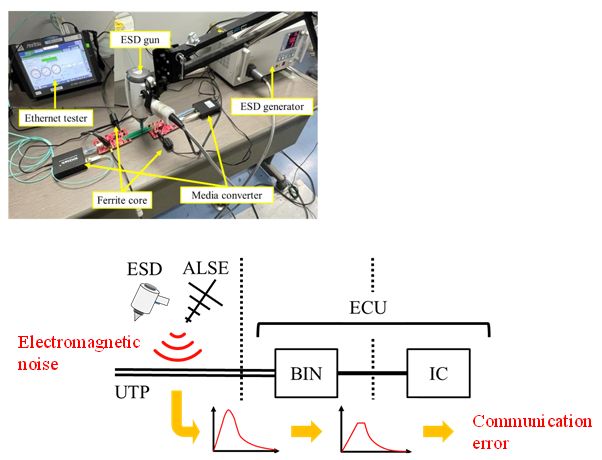
高周波ノイズの車載Ethernetの通信品質に対する影響の研究
車載通信のEMC設計を確かなものにするために、ノイズによる通信エラーのメカニズム解明が必要です。そこで本研究室では、外来ノイズの通信線への結合・伝搬や、それに起因する通信エラーについて、実測とシミュレーションの両面から解析する研究を行っています。
【研究例 9】
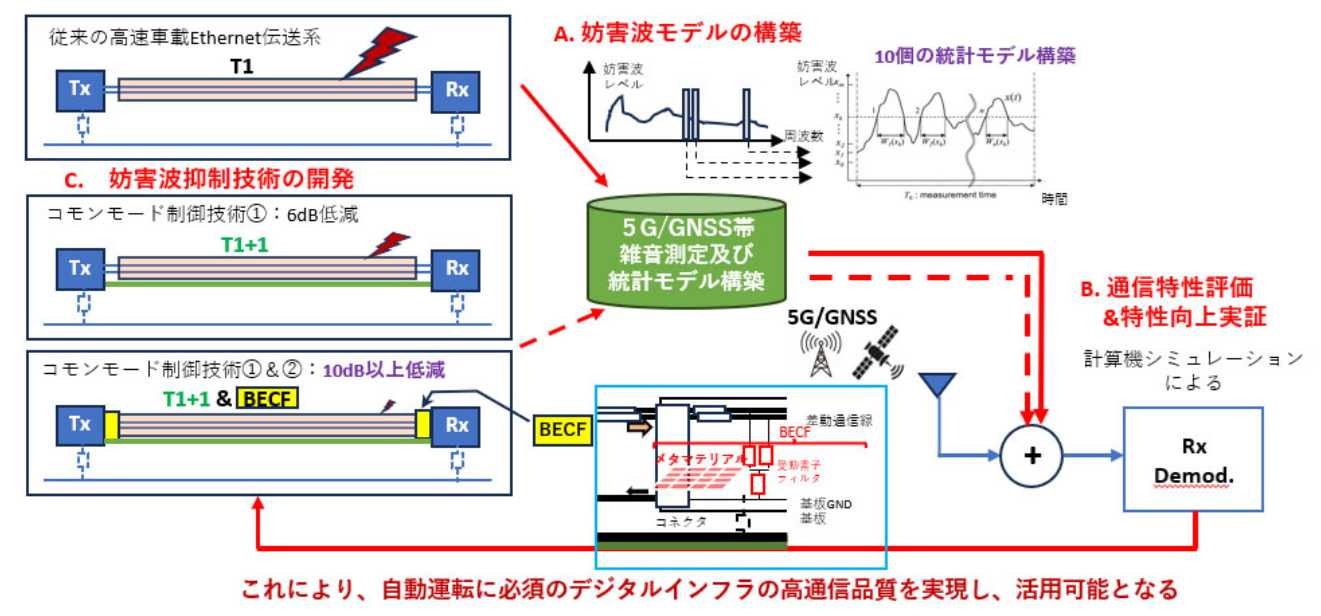
自動運転車において、車外とは5G/GNSS、車内では高速Ethernetが今後の通信の主流となる。本研究では、⾃動運転のデジタルインフラの構築・活⽤に必須の5G/GNSS 通信システムを対象に、それらに対する⾼速⾞載Ethernet 機器から放射される妨害波のモデリング・解析・抑制技術を研究開発し、安定した⾃動運転のためのデジタル通信インフラの運⽤に資する技術を確⽴する。
具体的には、高速車載Ethernetを対象に、
① 妨害波の統計モデルを構築し、5G/GNSSに影響をあたえるパラメータを解明;
② 差動通信線(UTP)にコモンモード帰路線を追加するT1+1通信線によるコモンモード制御技術、及び通信周波数帯域の妨害波発生量
を選択的に低減するバンド・エリミネーション・コモンモード・フィルタリング(BECF)技術;
を研究開発し、自動運転に必須の5G/GNSS通信インフラの高通信品質の実現に寄与する。
(総務省FORWARD委託研究)